
1. Einleitung: Was ist eigentlich "lineare Optimierung"?
Die lineare Optimierung ist ein Teilgebiet der Optimierungsrechnung. Diese Rechnung ist ein Hilfsmittel zur optimalen Entscheidungsfindung bei komplizierten Problemen.
Unter einschränkenden Bedingungen wird mit Hilfe der linearen Optimierung das Minimum beziehungsweise das Maximum einer linearen Funktion ermittelt. Die zu maximierende Funktion ist dabei meistens die Gleichung für den Gewinn, die zu minimierende Funktion die Gleichung für die Kosten eines Unternehmens.
Die einschränkenden Bedingungen, die Einfluss auf das Ergebnis haben, müssen herausgefunden werden, um sie dann mit dem zu erreichenden Maximum / Minimum in Verbindung zu setzen.
Die lineare Optimierung gehört zu den jüngeren Anwendungsgebieten der Mathematik. Vor einem halben Jahrhundert begann der richtige Durchbruch der linearen Optimierung mit der Simplexmethode, die von G.B. Dantzig entwickelt wurde. Die ersten Arbeiten der Linearen Optimierung wurden im Jahre 1939 von dem russischen Mathematiker Leonid W. Kantorowicz in diesem Gebiet veröffentlicht.
Besonders in den USA wurden am Ende des zweiten Weltkrieges neue Lösungsmöglichkeiten für Probleme der mathematischen Optimierung, die für den militärischen Bereich von Bedeutung waren, entwickelt.
Die Simplexmethode, mit der alle linearen Optimierungsprobleme gelöst werden können, ist bis heute das wichtigste Verfahren zur Lösung von Problemen dieser Art.
J. von Neumann und O. Morgenstern gelang es schon kurz nach Dantzig diese Methode beträchtlich weiterzuentwickeln. Seit Beginn der 50er Jahre erlebte dieser Bereich der Mathematik erneut eine rapide Aufwärtsentwicklung. Dieser große Aufschwung wirkte sich besonders günstig auf Großrechenanlagen aus, die Berechnungen nach dem Simplexverfahren in einer kurzen Zeit bewältigen konnten. Schon im Jahre 1956 konnten mit einer IBM- Maschine Probleme der linearen Optimierung mit mehr als 200 Gleichungen mit großer Genauigkeit gelöst werden. Die erste wichtige Anwendung auf wirtschaftliche Probleme erfolgte bei der Planung und Entwicklung von Erdölraffinerien.
Im Jahre 1979 entwickelte der Russe Khasian einen neuen Algorithmus, mit dem bei linearen Optimierungsproblemen mit einer großen Anzahl von Variablen und einschränkenden Bedingungen die optimale Lösung schneller bestimmt werden konnte. Der wesentliche Vorteil dieses Verfahrens liegt darin, dass der Rechenaufwand geringer ist, als beim Simplexverfahren. Heute gehört die lineare Optimierung zu den best erforschten Gebieten der Wirtschaftsmathematik.
3. Graphisches Verfahren
3.1 Aufgabenstellung
Eine Unternehmung stellt zwei Produkte P und P her. Die Fertigung erfolgt auf den Maschinen M , M und M und erfordert unterschiedliche Belegungszeiten. Die Bearbeitungsdauer (bezogen auf Minuten) und die Kapazitäten (bezogen auf Mengeneinheiten) der Maschine sind in der folgenden Tabelle angegeben.
|
|
Bearbeitungszeit |
Bearbeitungszeit |
Kapazität |
|
|
für P |
für P |
|
|
M |
|
|
|
|
M |
|
|
|
|
M |
|
|
|
Der Deckungsbeitrag pro ME beträgt 90 GE von P und 120 GE von P
Wie viele ME sind von P und von P herzustellen, damit der gesamte Deckungsbeitrag möglichst groß ist. Wie hoch ist dieser maximale Deckungsbeitrag?
xi sei die Zahl der Produkte Pi
Z = 90x + 120x } Zielfunktion
![]() 20x + 40x Maschine M
20x + 40x Maschine M
![]() 15x + 10x Maschine M
15x + 10x Maschine M
![]() 30x + 10x 5400 Maschine M
30x + 10x 5400 Maschine M
![]()
x1 0
x2 Nichtnegativitätsbedingungen
Die Zielfunktion ist das Optimierungskriterium, welches minimal oder maximal werden soll.
In diesem Fall geht es um den Deckungsbeitrag, der maximal werden soll.
Die Nebenbedingungen sind Restriktionen (Beschränkungen), die sich in diesem Fall aus den Kapazitätsbeschränkungen der Maschinen ergeben.
Es gibt nämlich keinen Sinn negative Werte für x und x zuzulassen, denn die produzierte Menge kann nicht negativ sein. Deshalb unterliegen die Variablen x und x den Nichtnegativitätsbedingungen.
3.2 Graphische Lösung
Für Systeme mit zwei Variablen lassen sich die möglichen Lösungsmengen in einer Ebene (zweidimensional) graphisch veranschaulichen:
Für das Gleichheitszeichen wird mit jeder Nebenbedingung eine Gerade definiert, die die Ebene in zwei Halbebenen teilt.
Durch das Ungleichheitszeichen wird die Halbebene spezifiziert, in der die mögliche Lösungsmenge liegt. Im Ergebnis entsteht ein Polygon (=Vieleck).
Dazu stellt man zunächst die Nebenbedingungen nach x um.
20x + 40x / - 20x
40x 8000 - 20x / : 40
x 200 - 0,5x
x 300 - 1,5x
x 540 - 3x
Die Zielfunktion löst man auch nach x auf:
Z = 90x + 120x
3 Z
x
4 120
Die Graphen dieser Funktionenschar sind parallele Geraden, die danach unterschieden werden können, in welchen Punkten
PZ
„ Z †
¦0/ —————¦ sie die y- Achse schneiden.
… 120 ‡
Man konstruiert die Gerade der Zielfunktion für Z = 0.
Die Gerade wird solange parallel nach oben verschoben, bis sie an einem Eckpunkt das Polygon verlässt. Dieser Eckpunkt ist ein Optimum unseres Problems.
Z=0 : 3 0
x = - --- x
3
x = - --- x
![]()
![]()
PMAX ist der optimale Punkt. Man erzielt den höchsten Deckungsbeitrag, wenn 100 ME von P und 150 ME von P hergestellt werden.
Berechnung des maximalen Deckungsbeitrags:
ZMax = 90x + 120x
= 90*100 + 120*150
![]() = 27000
= 27000
![]()
Der maximale Deckungsbeitrag beträgt 27000 GE.
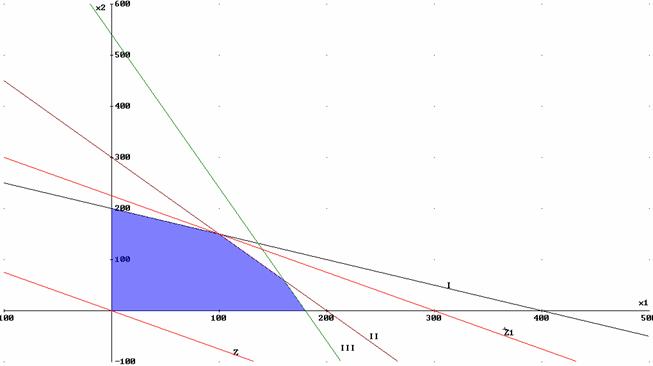
I x 200 - 0,5x
II x 300 - 1,5x
III x 540 - 3x
Z = - 0,75x (Parallelverschiebung von Z nach Z
4. Die reguläre Simplexmethode
Das graphische Verfahren zur Lösung von linearen Optimierungsproblemen ist nur anwendbar bei zwei, höchstens drei Variablen. Aber schon bei drei Variablen trifft man auf erhebliche Schwierigkeiten, weil drei Variablen eine räumliche Darstellung in der Zeichenebene verlangen.
Bei n Variablen werden die Lösungsmengen von Hyperebenen im n - dimensionalen Raum begrenzt.
Es ensteht ein Polyeder (= Vielflächner).
Die Simplexmethode ist eine algebraische Methode, die es ermöglicht, lineare Optimierungsprobleme mit beliebig vielen Variablen einfach und übersichtlich zu lösen.
Ein Simplex ist ein Polyeder des R n (n - dimensionalen Raums) mit n + 1 Ecken.
zum Beispiel: R : Dreieck R : Tetraeder


Das Simplexverfahren ist ein Iterationsverfahren (schrittweises Rechenverfahren zur Annäherung an die exakte Lösung).
Man beginnt mit einer Startnäherung (meist xi = 0) und verbessert sukzessive (allmählich eintretend) die Zielfunktion.
Das Verfahren wird an dem obigen Beispiel erläutert:
a) Durch Einführen von Schlupfvariablen (ui 0) wird das Optimierungsproblem als lineares
Gleichungssystem formuliert.
Die Schlupfvariable füllt den noch vorhandenen "Spielraum" aus, wenn die Werte für x
und x des linken Teils der Ungleichung kleiner als der Wert des rechten Teils sind.
Die Schlupfvariablen u , u und u übernehmen also die Werte der jeweils noch freien
Kapazität der Maschinen M , M und M
20x + 40x + u
15x + 10x + u
30x + 10x + u
90x + 120x = Z
(4 Gleichungen, 6 Unbekannte)
Basisvariable: Variable, die nach Vorgabe von zwei Variablen berechnet wird
(u , u , u
Nichtbasisvariable: frei vorgebbare Variablen (= 0)
(x , x
b) Startpunkt: x1 = x2 = 0 (Nichtbasisvariablen)
![]() Berechnen der
Basisvariablen
Berechnen der
Basisvariablen
I u = 8000 - 20x - 40x
II u = 3000 - 15x - 10x
III u = 5400 - 30x - 10x
IV Z = 90x + 120x
u
u
u
Z = 0
Bei dieser Ausgangslösung hat die Zielgröße den Wert Null; die Lösung ist im Sinne der Maximierung von Z aber eine "schlechte" Lösung.
c) Zur Verbesserung der Lösung soll nun ein Variablenaustausch erfolgen. Da x den größten
Einfluss auf die Zielfunktion hat, wird x in die Basis aufgenommen (x hat den größten
Einfluss auf die Zielfunktion, da der Deckungsbeitrag um 120 GE steigt, wenn der Wert
von x um eine ME steigt. Bei x steigt der Deckungsbeitrag nur um 90 GE).
Gegen welche Variable wird x getauscht?
x = 0, u
![]()
![]() Versuch 1: x u :
Versuch 1: x u :
aus I folgt:
x u = 8000 - 20x - 40x / - 8000 + 20x
u - 8000 + 20x = - 40x
- 8000 = - 40x / : (- 40)
x
aus II folgt:
u u = 3000 - 15x - 10x
u
u
aus III folgt:
u u = 5400 - 30x - 10x
u
u
x = 0, u
![]()
![]() Versuch 2: x u :
Versuch 2: x u :
aus II folgt:
x u = 3000 - 15x - 10x / - 3000 + 15x
u - 3000 + 15x = - 10x
- 3000 = - 10x / : (- 10)
x
aus I folgt:
u u = 8000 - 20x - 40x
u
u ( Widerspruch, da u < 0 !)
ui
x = 0, u
![]()
![]() Versuch 3: : x u :
Versuch 3: : x u :
aus III folgt:
x u = 5400 - 30x - 10x / -5400 + 30x
u - 5400 + 30x = -10x
-5400 = -10x / : -10)
x
aus II folgt:
u u = 3000 - 15x - 10x
u
u ( Widerspruch, da u < 0 !)
i
Die erste Gleichung stellt den Engpass dar, denn die "engste" Einschränkung wird durch die erste Maschine verursacht. Dort ist x nur 200. Deshalb wird x gegen u getauscht.
Die neuen Nichtbasisvariablen heißen x und u
d) Umschreiben auf die neuen Basisvariablen:
I u = 8000 - 20x - 40x / - 8000 + 20x
u - 8000 + 20x = - 40x / : (- 40)
u
x = - ---- + 200 - 0,5x
40
u
II u = 3000 - 15x - 10 (- ---- + 200 - 0,5x
40
1u
u = 3000 - 15x - --- - 2000 + 5x
4
1
u = 1000 - 10x
4
u
u = 1000 - 10x
4
III u = 5400 - 30x1 - 10x2
u
u = 5400 - 30x - 10(- -- + 200 - 0,5x
40
u
u = 5400 - 30x + -- - 2000 + 5x
4
u
u = 3400 - 25x
4
u
IV Z = 90x + 120(- -- + 200 - 0,5x
40
Z = 90x - 3u + 24000 - 60x
Z = 30x - 3u
Nichtbasisvariable, also x und u sind 0 !
Z = 30 * 0 - 3 * 0 + 24000
Z =24000
Die Variable x in die Basis aufzunehmen vergrößert Z.
Für den Engpass folgt aus der Gleichung I:
x = 400, aus Gleichung II x = 100 und aus Gleichung III x = 136. Den Engpass stellt somit die zweite Gleichung dar. Deshalb wird x gegen u getauscht.
e) Umschreiben auf die neuen Basisvariablen
u
II u = 1000 - 10x
4
u
u - 1000 = - 10x
4
u
u - 1000 + --- = - 10x
4
u u
- --- + 100 - --- = x
x in I, III und IV einsetzen
I u u u
x
40 10 40
u
x = - --- + 200 + 0,05u - 50 + 0,0125 u
40
u
x = - --- + 200 + 0,05u - 50 + 0,0125u
40
x = - 0,0125u + 150 + 0,05u
III u u u
u
10 40 4
u = 3400 + 2,5u - 2500 + 0,625u + 0,25u
u = 900 + 2,5u + 0,875u
IV u u
Z = 30( - --- + 100 - ---) - 3u
Z = - 3u + 3000 - 0,75u - 3u
Z = - 3u - 3,75u
Die Nichtbasisvariablen u und u sind Null, daraus folgt Z = 27000.
Das ist die optimale Lösung, weil ein Austauschen der Basisvariablen x , x und u gegen die Nichtbasisvariablen u und u keine Steigerung der Werte der Zielgröße nachsichzieht.
Denn nimmt man u oder u als Basisvariablen, dann ginge der Deckungsbeitrag zurück.
Der Deckungsbeitrag ist also mit 27000 GE maximal, wenn 100 ME von P und 150 ME von P hergestellt werden.
Die dritte Maschine hat dann noch eine freie Kapazität von 900 bezogen auf ME, die Maschinen M und M sind ausgelastet.
5. Simplex - Tableau:
Der oben beschriebene Lösungsweg lässt sich mit Hilfe des Simplex - Tableaus übersichtlicher darstellen.
Für das bekannte Beispiel gilt das folgende Tableau:
|
BV* |
x |
x |
u |
u |
u |
Abs. Glied |
Engpass |
|
u |
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
*) Basisvariable
x (150 ME von P
x (100 ME von P
u (die dritte Maschine hat noch eine freie Kapazität von 900 bezogen auf ME, die
Maschinen M und M sind ausgelastet)
Z = 27000 (max. Deckungsbeitrag)
5.1 Rechenregeln:
Die Pivot- Spalte ist die Spalte, in der die Variable mit dem größten Einfluss auf Z steht.
Die Pivot- Zeile wird durch den Engpass bestimmt:
Dazu nimmt man alle positiven Koeffizienten der Pivot- Spalte und teilt die absoluten Glieder durch die Koeffizienten. Der kleinste Wert bestimmt den Engpass. Negative
Koeffizienten und Nullen bleiben unberücksichtigt; kann kein Engpass bestimmt werden,
so ist das Optimierungsproblem nicht lösbar.
neu alt
Um die neue Zeile Zi zu berechnen, dividiere man alle Elemente der Schlüsselzeile Zi
durch das Pivot - Element.
Das Pivot- Element ist das Element in der Pivot- Spalte und der Pivot- Zeile.
Alle anderen Koeffizienten berechnet man nach der Vorschrift:
neu alt alt neu
![]()
![]() a i j = a i j - Si * Zj
a i j = a i j - Si * Zj
Zeile
Spalte
S = Pivot- Spalte
neu
Z = aus Pivot- Zeile hervorgegangene Zeile
Beispiele:
neu
a = 15 - 10 * 0,5 = 10
neu
a = 10 - 10 * 1 = 0
neu
a
neu
a = 1 - 10 * 0 = 1
Quellenangaben - Literaturverzeichnis
Taschenbuch Mathematischer Formeln
H.- J. Bartsch
Fachbuchverlag Leipzig, 1998
Lineare Algebra, Wirtschaft
Cornelsen, 1998
Haupt | Fügen Sie Referat | Kontakt | Impressum | Nutzungsbedingungen


